5. 定时器-定时-说中断¶
够用的硬件
能用的代码
实用的教程
屋脊雀工作室编撰 -20190101
愿景:做一套能用的开源嵌入式驱动(非LINUX)
官网:www.wujique.com
github: https://github.com/wujique/stm32f407
淘宝:https://shop316863092.taobao.com/?spm=2013.1.1000126.2.3a8f4e6eb3rBdf
技术支持邮箱:code@wujique.com、github@wujique.com
资料下载:https://pan.baidu.com/s/12o0Vh4Tv4z_O8qh49JwLjg
QQ群:767214262
定时器是芯片上一个最重要的外设。 在写代码时,经常需要一段代码延时一定时间后执行;或者是一段程序间隔一定时间不断重复执行。 最典型的就是嵌入式操作系统,例如freertos,就需要一个定时器作为系统调度心跳时钟。 在调试按键扫描时提到,我们可以将scan函数放到定时器中执行,这也是定时器驱动程序执行的一个例子。 定时器是一个统称,实际上定时仅仅是定时器的一个功能。 定时器的功能通常包括:定时、PWM输出、输入捕获、输入计数等功能。 这次,我们先调试定时功能。
5.1. 定时器¶
定时器是什么? 最简单的定时器就像一个倒计时时钟,大家的手机应该都有这个功能。 设定一个时间,例如10分钟,10分钟一到,闹铃就响起。 那单片机的定时器跟手机的定时器有什么区别呢?
- 我们用单片机定时器,通常定时都是us/ms/s,很少定时几分钟的。
- 单片机定时时间到了,不会直接响闹铃,一般只会在某个状态寄存器的某个bit置位,表明定时到了。如果这个定时器使能了中断,就会产生一个中断。
- 单片机的定时器功能更多,例如重复定时,假如定时1s,如果配置为自动重复,那么只要启动定时器,每一秒都会产生
闹铃,直到定时器被停止。 - 设置更复杂,手机要定时10分钟,直接拨指针或者输入10就可以了。单片机要定时10S,要根据系统时钟计算,选择合适的预分频和定时计数。还要设置相关的中断开关等。
5.2. STM32定时器¶
我们先看看STM32的定时器都有哪些功能。
5.2.1. 框图¶
使用一个芯片的定时器,先了解他的框图。
本次实验我们使用TIM5,在参考手册第15章节有详细说明。
下图是他的框图,看起来非常复杂,可见定时器功能是多么丰富。
如果我们只是当做一个定时器用,就只要关心红框内的三个框:
PSC预分频器,也就是我们设置的预分频系数,意思就是,例如我们设置为2,那么每经过2个CK_PSC时钟,CNT计数器才会变化1。
自动重载寄存器,设置的值跟CNT设置的值一样,如果我们设置为重复定时,如果是减计数,当CNT达到0,芯片会自动从重载寄存器拷贝计数值到计数器。加计数时,用CNT值跟重载寄存器比较,判断定时时间是否到。
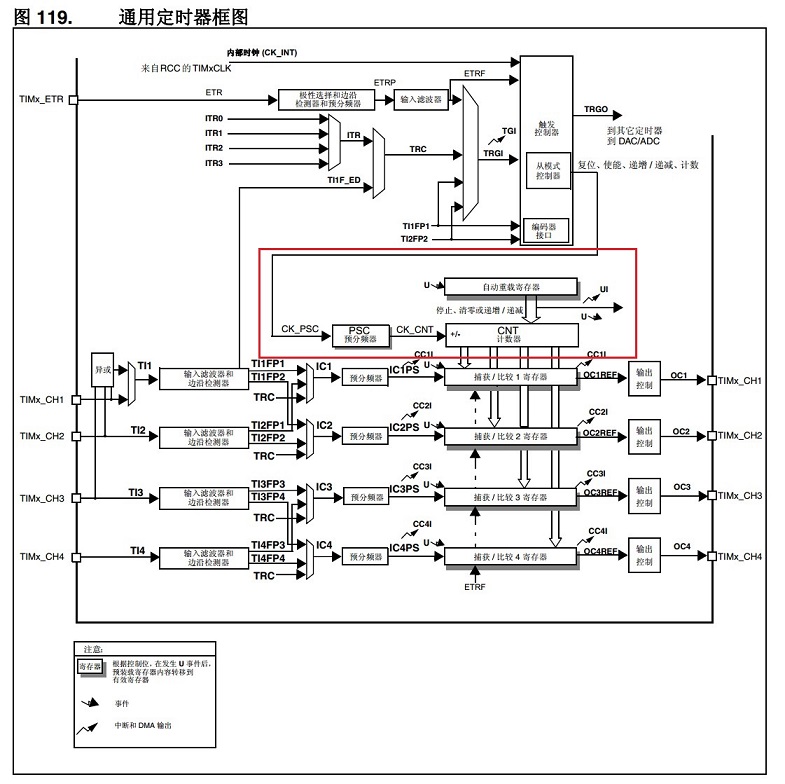 定时器框图
定时器框图
5.2.2. 时钟¶
前面说到,单片机定时器跟手机定时器比,单片机设置更复杂,设置要根据系统时钟计算。
那么我们就要先了解系统的时钟,通常在参考手册内会有一个时钟树。
STM32F407芯片时钟树在6.2章节,
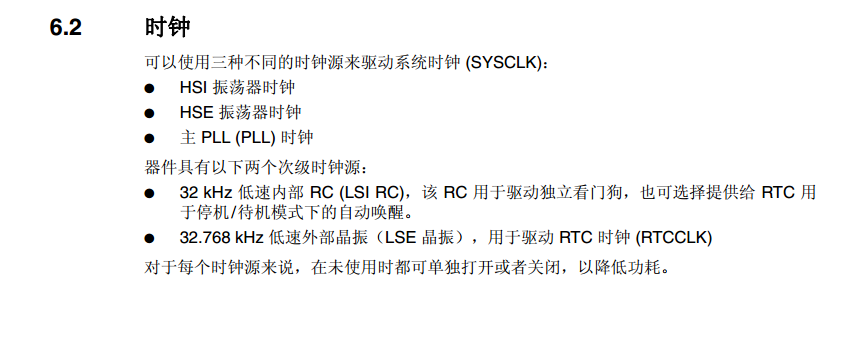 芯片时钟树
在本章节中,有针对定时器的说明
芯片时钟树
在本章节中,有针对定时器的说明
 定时器时钟
在system_stm32f4xx.c文件中,时钟初始化函数static void SetSysClock(void),对PCLK1进行了4分频初始化,那么168/4=42M,预分频是2不是1,因此定时器的时钟为APB时钟倍频,42M*2=84M。
定时器时钟
在system_stm32f4xx.c文件中,时钟初始化函数static void SetSysClock(void),对PCLK1进行了4分频初始化,那么168/4=42M,预分频是2不是1,因此定时器的时钟为APB时钟倍频,42M*2=84M。
#if defined(STM32F40_41xxx) || defined(STM32F427_437xx) || defined(STM32F429_439xx)
|| defined(STM32F412xG) || defined(STM32F446xx) || defined(STM32F469_479xx)
/* PCLK2 = HCLK / 2*/
RCC->CFGR |= RCC_CFGR_PPRE2_DIV2;
/* PCLK1 = HCLK / 4*/
RCC->CFGR |= RCC_CFGR_PPRE1_DIV4;
#endif /* STM32F40_41xxx || STM32F427_437x || STM32F429_439xx || STM32F412xG
|| STM32F446xx || STM32F469_479xx */
5.2.3. 初始化¶
下面代码为定时器初始化,前面是宏定义,大家写代码一定要多用宏定义,用宏定义的代码,修改起来更方便。
#define TestTim TIM5
/*
定时器时钟为84M,
Tout=((SYSTEM_CLK_PERIOD)*(SYSTEM_CLK_PRESCALER))/Ft us.
预分频,8400个时钟才触发一次定时器计数
那么一个定时器计数的时间就是(1/84M)*8400 = 100us
*/
#define SYSTEM_CLK_PRESCALER 8400
#define SYSTEM_CLK_PERIOD 10000//定时周期
/**
*@brief: mcu_timer_init
*@details: 定时器初始化
*@param[in] void
*@param[out] 无
*@retval:
*/
s32 mcu_timer_init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
//打开定时器时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE);
//复位定时器
TIM_Cmd(TestTim, DISABLE);
TIM_SetCounter(TestTim, 0);
//设定TIM5中断优先级
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStruct.TIM_Period = SYSTEM_CLK_PERIOD - 1; //周期
TIM_TimeBaseInitStruct.TIM_Prescaler = SYSTEM_CLK_PRESCALER-1;//分频
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 1;
TIM_TimeBaseInit(TestTim, &TIM_TimeBaseInitStruct);
TIM_ITConfig(TestTim, TIM_IT_Update, ENABLE);//打开定时器中断
TIM_Cmd(TestTim, ENABLE);//使能定时器(启动)
return 0;
}
在初始化函数内,主要分3部分:
- 时钟
第25行打开设备时钟。
- 定时器配置
27行,停止定时器。 28行,复位定时器计数值。 37行,时钟分频,配置为DIV1,也就是没分频,定时器时钟为84M。 38行,计数方式,选择向上计数。 39行,计数周期,也就是要定时多少个计数的意思,使用向上计数,计数达到后产生事件。 40行,设置预分频系数,也就是决定了每个计数的时长。 41行,设置是否自动重加载,意思是:一个定时到了,是否自动开始下一个定时(不断重复)。 42行,执行配置。 46行,启动定时器。
- 中断
31行,指定配置TIM5中断。 32行,设置抢断优先级。 33行,设置响应优先级。 34行,使能。 35行,执行配置。 44行,打开定时器中断。
预分频系数,也就是Prescaler。 程序中定义为8400,也就是说在84M时钟情况下,8400个时钟才触发一次定时器计数,那么一个定时器计数的时间就是(1/84M)*8400 = 100us,那么要定时1S钟,周期则要设置为1x1000x1000/100=10000。 经过10000次计数后,恰好就是1S,定时器会产生一个状态事件,如果中断使能,则发生中断。
5.3. 查询模式¶
如果没有使能中断,想要知道定时器是否已经到时间,需要一直查询定时器的状态寄存器。 如何查询?请看ST提供的库stm32f4xx_tim.c 其中有函数:
/**
* @brief Checks whether the specified TIM flag is set or not.
* @param TIMx: where x can be 1 to 14 to select the TIM peripheral.
* @param TIM_FLAG: specifies the flag to check.
* This parameter can be one of the following values:
* @arg TIM_FLAG_Update: TIM update Flag
* @arg TIM_FLAG_CC1: TIM Capture Compare 1 Flag
* @arg TIM_FLAG_CC2: TIM Capture Compare 2 Flag
* @arg TIM_FLAG_CC3: TIM Capture Compare 3 Flag
* @arg TIM_FLAG_CC4: TIM Capture Compare 4 Flag
* @arg TIM_FLAG_COM: TIM Commutation Flag
* @arg TIM_FLAG_Trigger: TIM Trigger Flag
* @arg TIM_FLAG_Break: TIM Break Flag
* @arg TIM_FLAG_CC1OF: TIM Capture Compare 1 over capture Flag
* @arg TIM_FLAG_CC2OF: TIM Capture Compare 2 over capture Flag
* @arg TIM_FLAG_CC3OF: TIM Capture Compare 3 over capture Flag
* @arg TIM_FLAG_CC4OF: TIM Capture Compare 4 over capture Flag
*
* @note TIM6 and TIM7 can have only one update flag.
* @note TIM_FLAG_COM and TIM_FLAG_Break are used only with TIM1 and TIM8.
*
* @retval The new state of TIM_FLAG (SET or RESET).
*/
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG)
用这个函数就可以查询定时器的各种状态了。 对应会有一个清标志函数:
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG)
必须手动用这个函数清除标志,否则,就不知道下一次定时器的到来了。
5.4. 中断¶
在前面章节,我们曾初步了解了芯片系统中断。现在我们再通过定时器中断看看中断的细节。 什么是中断呢?
通常我们的程序是按顺序执行(函数跳转和返回也是按顺序执行),顺序都是我们安排好的(我们上帝之手)。 当中断来临时,停止正在执行的程序,强行执行中断服务程序,中断服务程序运行结束后,在自动返回原来执行程序的位置继续执行。 中断和顺序程序不一样的就是,中断发生时间不确定。假设按键输入设置为IO中断,那么什么时候产生中断?随机的,没人知道什么时候会产生按键。
下面我们通过定时器的程序大概了解一下中断的应用。大家要注意,我们这里仅仅说应用,至于一个中断的切换返回细节,暂不做讨论。
5.4.1. NVIC¶
在STM32这个芯片中,或者说contex这种芯片中,与中断相关的有两部分:
- 外设本身,比如你要使用定时器的中断,必须在定时器中使能对应的中断。
- NVIC,嵌套向量控制器。
其中外设只要打开对应中断就行了。 NVIC就比较复杂了,NVIC是芯片控制管理所有中断的模块。 在《STM32F4xx中文参考手册.pdf》第10章有详细说明。 使用NVIC,主要内容是设置中断的优先级。
5.4.2. 优先级¶
contex内核有两个优先级:抢占和响应。 抢占优先级就是:如果A优先级高,B优先级低,当A发生中断,就算B正在处理中断,A也会立刻响应。 响应优先级就是:如果A响应优先级比B高,C中断正在执行,就算B先来,A也可以在C中断结束后,优先执行。前提是A和B的抢占优先级一样,并且不比C高。
通过上面分析,我们可以知道或者通常,把抢占优先级叫做主优先级,响应优先级叫做次优先级。 判断两个中断谁优先级高,先比主优先级,再比次优先级。
5.4.3. 优先级分组¶
哪么优先级怎么设置呢? contex提供了多达8bit用来控制抢占优先级和响应优先级。 STM32自用了其中的低4位,这低4位如何分配给抢占和响应,需要在初始化时调用函数分配:
/**
* @brief Configures the priority grouping: pre-emption priority and subpriority.
* @param NVIC_PriorityGroup: specifies the priority grouping bits length.
* This parameter can be one of the following values:
* @arg NVIC_PriorityGroup_0: 0 bits for pre-emption priority
* 4 bits for subpriority
* @arg NVIC_PriorityGroup_1: 1 bits for pre-emption priority
* 3 bits for subpriority
* @arg NVIC_PriorityGroup_2: 2 bits for pre-emption priority
* 2 bits for subpriority
* @arg NVIC_PriorityGroup_3: 3 bits for pre-emption priority
* 1 bits for subpriority
* @arg NVIC_PriorityGroup_4: 4 bits for pre-emption priority
* 0 bits for subpriority
* @note When the NVIC_PriorityGroup_0 is selected, IRQ pre-emption is no more possible.
* The pending IRQ priority will be managed only by the subpriority.
* @retval None
*/
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)
一共可以设置5中分组模式,什么意思呢? 例如第一种分组模式NVIC_PriorityGroup_0,这种分组模式,pre优先级没有,也就是不能设置(强制设置会出现意外),4bit都用来表示sub优先级,那么sub优先级就可以设置0~15。 如果设置为NVIC_PriorityGroup_2,pre优先级两位,可以设置0~3,sub优先级同样2位,也可以设置0~3。 每个系统具体如何设置中断优先级,需要根据所有中断需求合理分配。
5.4.4. 中断服务函数¶
一旦中断产生,就需要执行中断服务程序。 定时器的中断程序如下,这个函数就是中断服务函数。在函数我们判断了是不是Update中断,为什么要判断呢?因为定时器中断入口只有一个,定时器中断有多种,当中断产生时,只能通过标志区分是什么中断源。
/**
*@brief: mcu_tim5_IRQhandler
*@details: 定时器中断处理函数
*@param[in] void
*@param[out] 无
*@retval:
*/
void mcu_tim5_IRQhandler(void)
{
if(TIM_GetITStatus(TIM5, TIM_FLAG_Update) == SET)
{
TIM_ClearFlag(TIM5, TIM_FLAG_Update);
mcu_tim5_test();
}
}
在stm32f4xx_it.c中断响应中调用void mcu_tim5_IRQhandler(void);
void TIM5_IRQHandler(void)
{
mcu_tim5_IRQhandler();
}
TIM5_IRQHandler这个函数名,是在中断向量中定义好的,一定要一样。
5.4.5. 中断向量¶
前面章节我们其实已经讨论过中断向量,我们看看定时器5的中断向量。
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
DCD MemManage_Handler ; MPU Fault Handler
DCD BusFault_Handler ; Bus Fault Handler
DCD UsageFault_Handler ; Usage Fault Handler
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD SVC_Handler ; SVCall Handler
DCD DebugMon_Handler ; Debug Monitor Handler
DCD 0 ; Reserved
DCD PendSV_Handler ; PendSV Handler
DCD SysTick_Handler ; SysTick Handler
...
DCD SDIO_IRQHandler ; SDIO
DCD TIM5_IRQHandler ; TIM5
定时器5的中断函数指针在19行(文件137行)。
5.4.6. 定时器中断流程¶
到此,我们已经配置好定时器了,流程大概如下: 1 使能定时器时钟,并配置定时器。 2 设置NVIC定时器中断优先级。 3 打开定时器中断,启动定时器。 4 定时到后,产生时间标志,同时产生中断标志。 5 芯片从中断向量查找中断服务程序入口,执行中断服务程序。执行后返回。 6 重复4。
5.5. 编码实验¶
代码见\mcu_dev目录下的mcu_timer.c和mcu_timer.h。 另外,在main函数前调用void mcu_timer_init(void)函数,初始化定时器。
/* Infinite loop */
mcu_uart_open(3);
wjq_log(LOG_INFO, "hello word!\r\n");
dev_key_init();
mcu_timer_init();
dev_key_open();
while (1)
{
/*驱动轮询*/
dev_key_scan();
/*应用*/
u8 key;
s32 res;
res = dev_key_read(&key, 1);
if(res == 1)
{
if(key == DEV_KEY_PRESS)
{
GPIO_ResetBits(GPIOG, GPIO_Pin_0
| GPIO_Pin_1 | GPIO_Pin_2| GPIO_Pin_3);
}
else if(key == DEV_KEY_REL)
{
GPIO_SetBits(GPIOG, GPIO_Pin_0
| GPIO_Pin_1 | GPIO_Pin_2| GPIO_Pin_3);
}
}
Delay(1);
}
编译后下载进去,串口可见运行结果,从结果看,确实每秒中进入一次定时器中断。
hello word! tim int 1 tim int 2 tim int 3 tim int 4 tim int 1 tim int 2 tim int 3 tim int 4 tim int 1 tim int 2
5.6. 总结¶
定时器功能就实现了。 请大家自行尝试将按键扫描放到定时器中,并且将定时器定时改为5毫秒一次中断。