15. 模拟SPI-XPT2046-电阻式触摸屏调试¶
够用的硬件
能用的代码
实用的教程
屋脊雀工作室编撰 -20190101
愿景:做一套能用的开源嵌入式驱动(非LINUX)
官网:www.wujique.com
github: https://github.com/wujique/stm32f407
淘宝:https://shop316863092.taobao.com/?spm=2013.1.1000126.2.3a8f4e6eb3rBdf
技术支持邮箱:code@wujique.com、github@wujique.com
资料下载:https://pan.baidu.com/s/12o0Vh4Tv4z_O8qh49JwLjg
QQ群:767214262
上一节我们调试了触摸屏,用的是STM32内置ADC方案。 现在就让我们调试常见的XPT2046方案。
15.1. XPT2046¶
XPT2046是什么?很多朋友可能认为XPT2046是一个触摸屏检测IC,这不是很准确。 XPT2046是一个ADC转换芯片,支持4线电阻屏的AD转换。它并没有实现电阻屏检测流程。
XPT2046 是一款 4 导线制触摸屏控制器,内含 12 位分辨率 125KHz转换速率逐步逼近型 A/D 转换器。XPT2046支持从 1.5V 到 5.25V 的低电压 I/O 接口。XPT2046 能通过执行两次 A/D 转换查出被按的屏幕位置, 除此之外,还可以测量加在触摸屏上的压力。内部自带 2.5V参考电压可以作为辅助输入、温度测量和电池监测模式之用,电池监测的电压范围可以从 0V 到 6V。XPT2046片内集成有一个温度传感器。
- 工作原理
我们直接从数字接口时序看其工作原理:
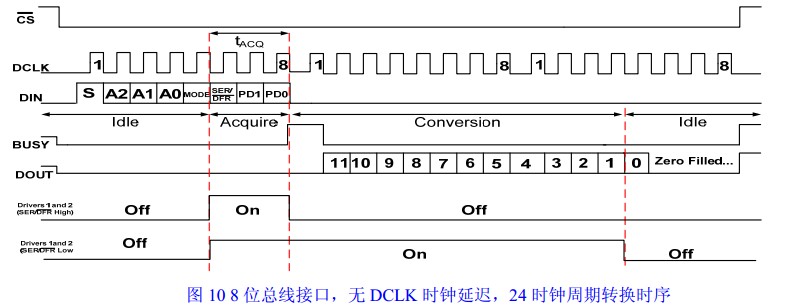 时序1
DIN是输入数据,首先发送一个字节到XPT2046,这个字节叫命令字:
时序1
DIN是输入数据,首先发送一个字节到XPT2046,这个字节叫命令字:
bit7:S,启动标志,固定为1 bit6-bit4:A2/A1/A0,通道选择,差分模式跟单端不一样,差分模式如下:
- 001,测Y轴 011,测Z1 100,测Z2 101,测X轴
bit3 :MODE,1 =8位ADC,0 =12位ADC bit2:SEF/DFR,单端模式还是差分模式,XY轴跟压力可以用差分,最好用差分;其他功能只能用单端模式。 bit1-bit0:PD1/PD0, 工作模式: 11,总是处于供电状态;00,在变换之间进入低功耗
发送完命令字后,XPT2046开始转换,BUSY管脚变高。
当BUSY管脚变低时,XPT2046转换结束。
通过DOUT读数据,转换数据是12位(位数可设置,我们用12位)。
分两字节读取,第一字节返回BIT11-BIT5,也就是说,第1字节低7位有效,最高位无效。第二字节返回BIT4-BIT0,高5位有效,低3位无效。
下图是XPT2046压力测试原理,可见Z1,Z2测试位置跟我们用内置ADC的原理一样。
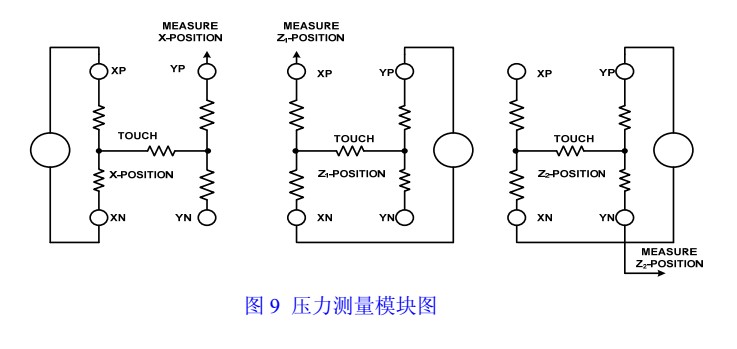 测试原理
按照上节说的触摸屏转换原理。使用XPT2046的转换流程就是:
测试原理
按照上节说的触摸屏转换原理。使用XPT2046的转换流程就是:
测Z2通道, 测试压力Y轴电压。 测Z1通道, 测试压力X轴电压。 测X通道, 测试位置X轴电压。 测Y通道, 测试位置Y轴电压。
为了加快转换数据读取速度,XPT2046提供了其他通信时序。
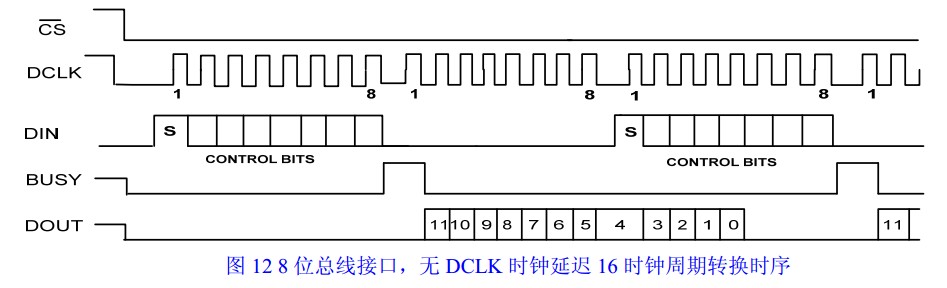 快时序
与前面时序的区别就是:在读最后一个字节数据时,启动下一次转换。
需要注意的是,读第一个字节时必须发送0X00,不能发送其他数据。
快时序
与前面时序的区别就是:在读最后一个字节数据时,启动下一次转换。
需要注意的是,读第一个字节时必须发送0X00,不能发送其他数据。
15.2. 硬件原理¶
用XPT2046方案的LCD,接口跟用ADC方案的一样。
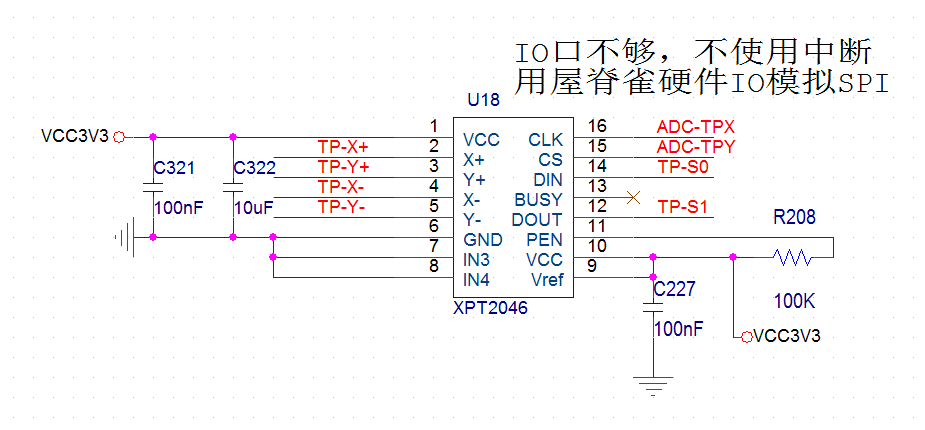
下图是XPT2046原理图,电阻屏四根线接到2、3、4、5管脚。
SPI 时钟CLD接到原来的ADC-TPX脚,
SPI 片选接到ADC-TPY,
SPI DIN接到TP-SO,
SPI DOUT接到TP-SI。
这四个管脚不是硬件SPI控制器的管脚,需要用IO模拟实现SPI功能。
 原理图
原理图
15.3. 驱动架构设计¶
整体架构上一节已经说明。 驱动的大概流程就是:
启动定时器,定时时间为1ms。 在定时中断内用VSPI接口控制XPT2406转换,并读取数据。 对数据按照ADC同样的方法处理。 识别到样点就填入缓冲。
15.3.1. 模拟SPI(VSPI)设计¶
用STM32内置SPI控制器的SPI驱动我们已经完成。 模拟SPI就按照硬件控制器的接口实现。
- 接口(与硬件SPI统一) VSPI也是SPI,接口当然跟SPI一样
static s32 mcu_vspi_init(void)
static s32 mcu_vspi_open(SPI_DEV dev, SPI_MODE mode, u16 pre)
static s32 mcu_vspi_close(SPI_DEV dev)
static s32 mcu_vspi_transfer(SPI_DEV dev, u8 *snd, u8 *rsv, s32 len)
static s32 mcu_vspi_cs(SPI_DEV dev, u8 sta)
同时将原来的硬件SPI控制器接口函数加上h标志,例如:
static s32 mcu_hspi_init(void);
对于上层来说,模拟SPI还是硬件SPI,都是SPI,因此原来的接口就是统一对外接口,在接口内通过判断,决定调用VSPI接口还是HSPI接口。例如:
s32 mcu_spi_open(SPI_DEV dev, SPI_MODE mode, u16 pre)
- 多个VSPI的统一
后续我们的外扩IO口可能会接SPI设备,也是需要用IO口模拟SPI的。 前面我们说过驱动和设备的关系。多个VSPI设备肯定只用一套VSPI代码。 为了实现这个目的,我们定义了VSPI设备对象,如下:
typedef struct
{
char *name;
SPI_DEV dev;
s32 gd;
u32 clkrcc;
GPIO_TypeDef *clkport;
u16 clkpin;
u32 mosircc;
GPIO_TypeDef *mosiport;
u16 mosipin;
u32 misorcc;
GPIO_TypeDef *misoport;
u16 misopin;
u32 csrcc;
GPIO_TypeDef *csport;
u16 cspin;
}DevVspiIO;
当要使用一个VSPI设备时,只需要定义一个设备实体,并添加到VPSI列表即可:
DevVspiIO DevVspi1IO={
"VSPI1",
DEV_VSPI_1,
-2,//未初始化
VSPI1_RCC,
VSPI1_CLK_PORT,
VSPI1_CLK_PIN,
VSPI1_RCC2,
VSPI1_MOSI_PORT,
VSPI1_MOSI_PIN,
VSPI1_RCC2,
VSPI1_MISO_PORT,
VSPI1_MISO_PIN,
VSPI1_RCC,
VSPI1_CS_PORT,
VSPI1_CS_PIN,
};
/*无用的虚拟SPI设备,占位用*/
DevVspiIO DevVspiNULL={
"VSPI0",
DEV_VSPI_0,
-2,//未初始化;
};
DevVspiIO *DevVspiIOList[]={
&DevVspiNULL,
#ifdef SYS_USE_VSPI1
&DevVspi1IO,
#endif
};
如上,DevVspi1IO就是我们定义的VSPI1设备,然后添加到DevVspiIOList数组。 以后就可以通过mcu_spi_open等spi接口操作这个VSPI设备了。
- VSPI实现
VSPI的代码就请看源码,不累述。
15.3.2. 定时器改造¶
XPT2046需要定时转换,跟ADC使用定时器一样,也使用定时器7。 但是在ADC中,定时器执行一次就停止了,下一次由TASK启动。 XPT需要连续启动。 我们改造定时器7的代码,让它能用于这两种情况。
s32 mcu_tim7_start(u32 Delay_10us, void (*callback)(void), u8 type)
。。。
/**
*@brief: mcu_tim6_IRQhandler
*@details: 定时器中断处理函数
*@param[in] void
*@param[out] 无
*@retval:
*/
void mcu_tim7_IRQhandler(void)
{
if(TIM_GetITStatus(TpTim, TIM_FLAG_Update) == SET)
{
TIM_ClearFlag(TpTim, TIM_FLAG_Update);
if(Tim7Type == 1)
TIM_Cmd(TpTim, DISABLE);//停止定时器
Tim7Callback();
}
}
在mcu_tim7_start函数增加两个参数:
callback:中断服务程序回调,当定时器中断发生时,就执行这个callback函数。 type:类型,是一次还是重复。
mcu_tim7_IRQhandler同步改造。 原来ADC方案用到mcu_tim7_start的地方也同步改造。
15.3.3. XTP2046驱动说明¶
只有一个关键函数dev_xpt2046_task,
void dev_xpt2046_task(void)
{
static u16 pre_y, pre_x;
static u16 sample_y, sample_x;
static u8 pendownup = 1;
struct ts_sample tss;
u8 stmp[4];
u8 rtmp[4];
if(DevXpt2046Gd != 0)
return;
/*
整个流程分四步
读Z1,Z2,用于计算压力
读X,Y轴,用于计算坐标
1 使用了快速16CLK操作法,过程100us左右。
经测试,中间不需要延时。
2 没有使用下笔中断,通过压力判断是否下笔。但是有点疑惑,理论上接触电阻应该很小的,
用ADC方案,正常,用XPT2046方案,感觉接触电阻比较大,不知道是哪里没有理解对。
3 快速CLK操作,也就是在读最后一个字节的时候同时发送下一个转换命令。
一定要第一个字节发送0X00,第二个字节发送命令。如果第一个字节不是00,而且正好BIT7是1,
芯片会重新启动转换,读回来的电压值就都不对了。
4 实测,不需要延时,如果你的SPI时钟较快,请注意延时等待转换结束。
5 理论上还可以节省一个字节的发送时间,请自行优化。
*/
/*------------------------*/
stmp[0] = XPT2046_CMD_Z2;
mcu_spi_transfer(XPT2046_SPI, stmp, NULL, 1);
//vspi_delay(100);
stmp[0] = 0x00;
stmp[1] = XPT2046_CMD_Z1;
mcu_spi_transfer(XPT2046_SPI, stmp, rtmp, 2);
pre_y = ((u16)(rtmp[0]&0x7f)<<5) + (rtmp[1]>>3);
/*------------------------*/
//vspi_delay(100);
stmp[0] = 0x00;
stmp[1] = XPT2046_CMD_X;
mcu_spi_transfer(XPT2046_SPI, stmp, rtmp, 2);
pre_x = ((u16)(rtmp[0]&0x7f)<<5) + (rtmp[1]>>3);
/*------------------------*/
//vspi_delay(100);
stmp[0] = 0x00;
stmp[1] = XPT2046_CMD_Y;
mcu_spi_transfer(XPT2046_SPI, stmp, rtmp, 2);
sample_x = ((u16)(rtmp[0]&0x7f)<<5) + (rtmp[1]>>3);
/*------------------------*/
//vspi_delay(100);
stmp[0] = 0x00;
stmp[1] = 0X00;
mcu_spi_transfer(XPT2046_SPI, stmp, rtmp, 2);
sample_y = ((u16)(rtmp[0]&0x7f)<<5) + (rtmp[1]>>3);
/*
算压力
简化算法
实际:
R触摸电阻=Rx面板*(X位置/4096)*(Z2/Z1-1)
*/
if(pre_x + DEV_XPT2046_PENDOWN_GATE > pre_y)
{
/*有压力*/
tss.pressure = 200;//DEV_XPT2046_PENDOWN_GATE - rpress;
tss.x = sample_x;
tss.y = sample_y;
dev_touchscreen_write(&tss,1);
//uart_printf("%d,%d,%d\r\n", tss.pressure, tss.x, tss.y);
pendownup = 0;
}
else if(pre_x + DEV_XPT2046_PENUP_GATE < pre_y)//没压力,不进行XY轴检测
{
/* 起笔只上送一点缓冲*/
if(pendownup == 0)
{
pendownup = 1;
tss.pressure = 0;//压力要搞清楚怎么计算
tss.x = 0xffff;
tss.y = 0xffff;
dev_touchscreen_write(&tss,1);
}
}
else
{
//uart_printf("--press :%d %d\r\n", pre_y, pre_x);
/*上下笔的过渡,丢弃*/
}
}
- 36到60行,读取压力跟坐标值。在ADC方案中,这些电压值通过多步读取,XPT2046就直接一次性读取了。如果想优化性能,减少没有触摸时读数据时间,可以按照ADC方案,判断到压力后再读取坐标。
- 68行之后的就跟ADC方案类似了,判断压力的三个状态,进行分别数据处理。
15.3.4. XPT2046跟ADC方案的兼容¶
修改下面三个接口函数,通过宏控制使用ADC方案还是XPT2046方案。具体修改见代码。
/*
触摸屏方案选择
*/
//#define SYS_USE_TS_ADC_CASE
#define SYS_USE_TS_IC_CASE
extern s32 dev_touchscreen_init(void);
extern s32 dev_touchscreen_open(void);
extern s32 dev_touchscreen_close(void);
15.3.5. 测试¶
测试程序跟上一节一样,测试效果如下图,跟ADC测试效果是有差别的:线条细,飞点少。 原因有两个:
一是ADC采样率更高,同样时间得到的样点比XPT2046多,毕竟XPT2046是1毫秒采样一个样点。 二是内置的ADC稳定性我们还没有处理,或者是我们的电子开关电路没调试好。
但是并不是说XPT2046效果就比ADC好,当快速划线时,由于XPT2046采样率只有1K,会出现断线。
可以通过加快采样率,或者是在应用层软件连线解决。
 测试效果
测试效果
15.4. 总结¶
了解触摸屏原理后,使用XTP2046做触摸检测并不复杂。 通过本章节,我们初步了解了同一个功能使用两种方案应该如何设计驱动程序。