6. 定时器-PWM-蜂鸣器¶
够用的硬件
能用的代码
实用的教程
屋脊雀工作室编撰 -20190101
愿景:做一套能用的开源嵌入式驱动(非LINUX)
官网:www.wujique.com
github: https://github.com/wujique/stm32f407
淘宝:https://shop316863092.taobao.com/?spm=2013.1.1000126.2.3a8f4e6eb3rBdf
技术支持邮箱:code@wujique.com、github@wujique.com
资料下载:https://pan.baidu.com/s/12o0Vh4Tv4z_O8qh49JwLjg
QQ群:767214262
上一章节我们调试了定时器定时功能。现在我们调试定时器输出PWM功能。
6.1. PWM¶
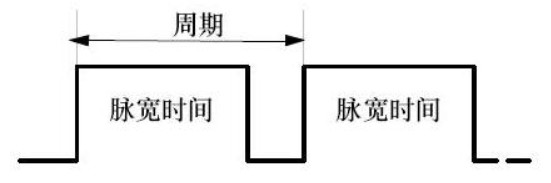
PWM(Pulse Width Modulation)是脉冲宽度调制的缩写。
 PWM波形
简单的说就是高低电平不断切换。在流水灯章节我们曾经提过。
一个高低电平切换就是一个周期,在一个周期内,高电平持续时间占周期的百分比就是常说的占空比。
PWM常用于控制灯光和电机。通常占空比越大,电机转速越快,LED越亮(高电平驱动方式)。
PWM波形
简单的说就是高低电平不断切换。在流水灯章节我们曾经提过。
一个高低电平切换就是一个周期,在一个周期内,高电平持续时间占周期的百分比就是常说的占空比。
PWM常用于控制灯光和电机。通常占空比越大,电机转速越快,LED越亮(高电平驱动方式)。
6.2. 原理图¶
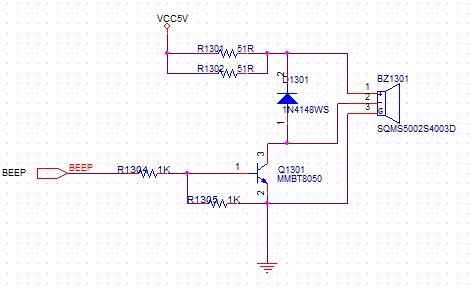
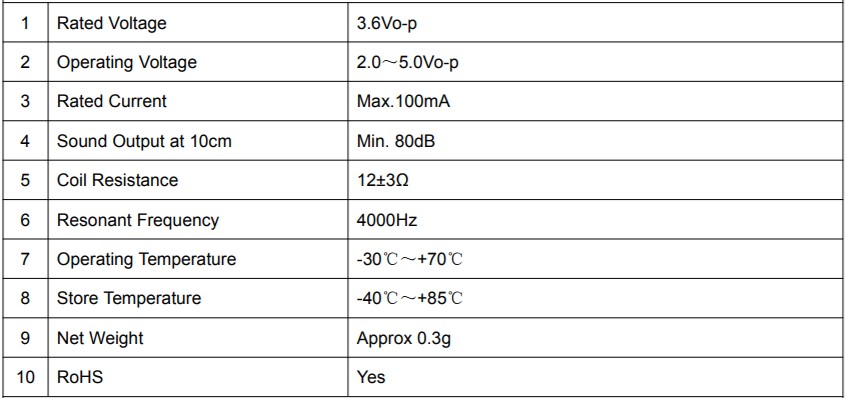
本次我们使用一个固定频率的50%占空比PWM驱动一个电磁式蜂鸣器。
 蜂鸣器电路
蜂鸣器选用贴片电磁式,参数如下,从表中可以看到,只要我们输出一个4000Hz的频率,就能驱动蜂鸣器。
蜂鸣器电路
蜂鸣器选用贴片电磁式,参数如下,从表中可以看到,只要我们输出一个4000Hz的频率,就能驱动蜂鸣器。
 蜂鸣器参数
蜂鸣器参数
6.3. STM32定时器PWM¶
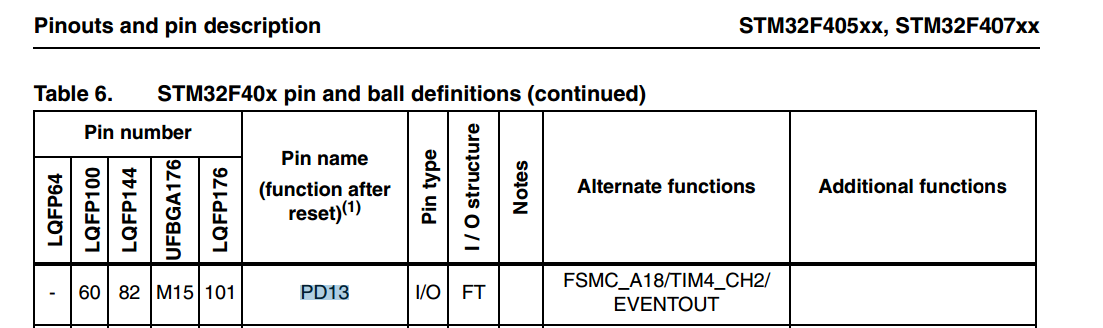
蜂鸣器beep接在PD13,在数据手册《STM32F407_数据手册.pdf》中可查到,PD13是TIM4的CH2,因此要在这个IO上输出PWM,需要用定时器4,并且是在通道2上输出。
 定时器PWM
上一节我们看过定时器的框图,做PWM功能,需要用到的功能比定时多了输出控制部分。
也就是下图右下角的大红框中的内容。
定时器PWM
上一节我们看过定时器的框图,做PWM功能,需要用到的功能比定时多了输出控制部分。
也就是下图右下角的大红框中的内容。
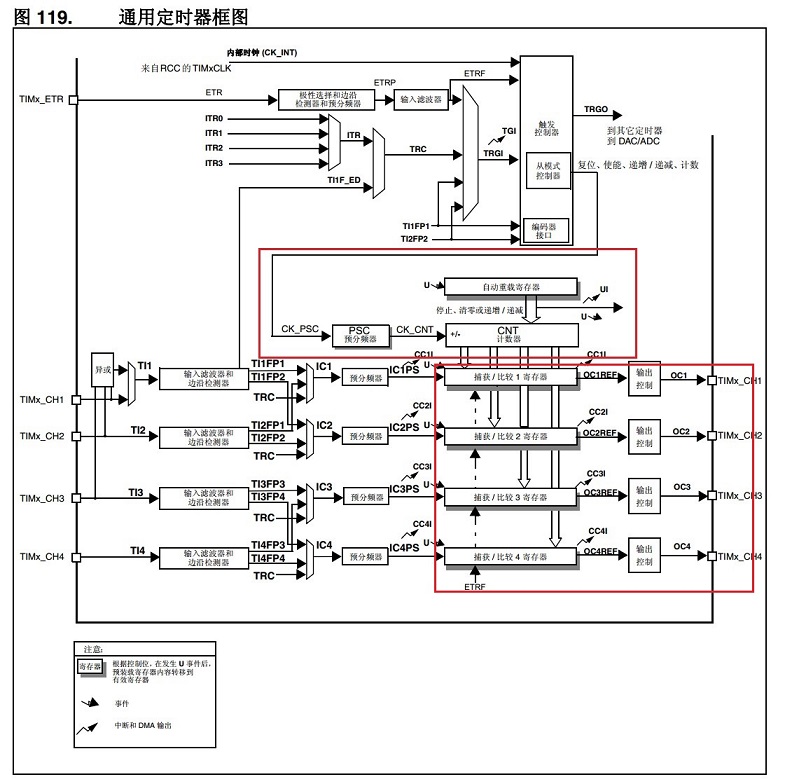 定时器框图
如何使用定时器4在PD13上输出4KHz的PWM?我们通过代码讲解。
定时器框图
如何使用定时器4在PD13上输出4KHz的PWM?我们通过代码讲解。
6.4. 编码¶
在board_dev文件夹创建两个新文件dev_buzzer.c、dev_buzzer.h,将这两个文件夹添加到工程。
6.4.1. IO口初始化¶
把一个IO口作为外设功能,只需要将对应IO口设置为AF模式,并且使用配置函数配置为对应的外设功能,具体见初始化函数注释。
s32 dev_buzzer_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE); //---使能 GPIOD 时钟
GPIO_PinAFConfig(GPIOD,GPIO_PinSource13,GPIO_AF_TIM4); //---管脚复用为 TIM4功能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //---复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //---速度 50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //---推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //---上拉
GPIO_Init(GPIOD,&GPIO_InitStructure);
mcu_tim4_pwm_init(BUZZER_CLK_PERIOD,BUZZER_CLK_PRESCALER);
return 0;
}
6.4.2. 定时器初始化¶
在初始化函数内,调用mcu_timer.c文件的mcu_tim4_pwm_init函数初始化定时器4。
void mcu_tim4_pwm_init(u32 arr,u32 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//---TIM4 时钟使能
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_Prescaler = psc - 1; //---定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //---向上计数模式
TIM_TimeBaseStructure.TIM_Period= arr - 1; //---自动重装载值
TIM_TimeBaseInit(TIM4,&TIM_TimeBaseStructure);//---初始化定时器 4
//----初始化 TIM4 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //---PWM 调制模式 1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //---比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //---输出极性低
/*默认配置的是通道2*/
TIM_OC2Init(TIM4, &TIM_OCInitStructure); //---初始化外设 TIM4
TIM_SetCompare2(TIM4, arr/2);//---占空比50%
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //---使能预装载寄存器
TIM_ARRPreloadConfig(TIM4,ENABLE);
}
相对前面配置定时功能,多了PWM配置。
15行,配置定时器输出模式, 定时器输出有以下6种模式选择。
/** @defgroup TIM_Output_Compare_and_PWM_modes
* @{
*/
#define TIM_OCMode_Timing ((uint16_t)0x0000)
#define TIM_OCMode_Active ((uint16_t)0x0010)
#define TIM_OCMode_Inactive ((uint16_t)0x0020)
#define TIM_OCMode_Toggle ((uint16_t)0x0030)
#define TIM_OCMode_PWM1 ((uint16_t)0x0060)
#define TIM_OCMode_PWM2 ((uint16_t)0x0070)
16行,比较输出使能,也就是打开PWM输出功能。 17行,输出极性低,这个所谓的输出极性,也就是控制比较寄存器比设置的计数小的时候,输出0还是输出1。或者简单的理解就是,先输出低电平还是先输出高电平。 20-23行,执行配置,这个地方要注意,不同的输出通道设置,需要使用不同的函数: 我们用的是通道2,那么用的就是TIM_OC2Init、TIM_SetCompare2、TIM_OC2PreloadConfig。 在库文件中可以看到下面这些函数,定时器有4个通道,就有4套配置函数。定时器输出设置函数
IO口和定时器都配置好后,只要启动定时器,就可以输出PWM了。
6.4.3. 打开和关闭的逻辑¶
经过初始化后,输出PWM,蜂鸣器就会响。 应用上不可能让蜂鸣器一直响,所以要提供OPEN和CLOSE接口。 如下:
/**
*@brief: dev_buzzer_open
*@details: 打开蜂鸣器
*@param[in] void
*@param[out] 无
*@retval:
*/
s32 dev_buzzer_open(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE); //---使能 GPIOD 时钟
GPIO_PinAFConfig(GPIOD,GPIO_PinSource13,GPIO_AF_TIM4); //---管脚复用为 TIM4功能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //---复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //---速度 50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //---推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //---上拉
GPIO_Init(GPIOD,&GPIO_InitStructure);
TIM_Cmd(TIM4, ENABLE); //---使能 TIM4
return 0;
}
/**
*@brief: dev_buzzer_close
*@details: 关闭蜂鸣器
*@param[in] void
*@param[out] 无
*@retval:
*/
s32 dev_buzzer_close(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_Cmd(TIM4, DISABLE); //---关闭定时器 TIM4
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE); //---使能 GPIOD 时钟
/*关闭蜂鸣器时,要将IO改为普通IO,并且输出低电平,否则蜂鸣器会造成大电流*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //---复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //---速度 50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //---推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //---上拉
GPIO_Init(GPIOD,&GPIO_InitStructure);
GPIO_ResetBits(GPIOD, GPIO_Pin_13);
return 0;
}
是不是跟你想的不一样?只要停止或者启动定时器不就行了吗? 功能上,确实是只要停止定时器,PWM就没有输出,蜂鸣器就不响;打开定时器,输出PWM,定时器就会响。 但是实际上会有问题,请看注释。
因为我们关闭PWM输出,是直接停止定时器。那么在停止定时器的时候,PWM输出的电平是随机的,如果正好在输出高电平时停止定时器,蜂鸣器电流上的三极管就一直处于导通状态,此时电流会增大100ma。 所以关闭蜂鸣器后要将IO转为输出模式,并输出低电平。打开蜂鸣器时再将IO设置为PWM模式。
6.5. 调试¶
在main函数中增加如下代码,初始化后,按下按键蜂鸣器响,松开按键蜂鸣器关。
/* Infinite loop */
mcu_uart_open(3);
uart_printf("hello word!\r\n");
mcu_timer_init();
dev_key_init();
dev_buzzer_init();
while (1)
{
s32 key;
key = dev_key_scan();
if(key == 0)
{
GPIO_ResetBits(GPIOG, GPIO_Pin_0
| GPIO_Pin_1 | GPIO_Pin_2| GPIO_Pin_3);
dev_buzzer_open();
}
else if(key == 1)
{
GPIO_SetBits(GPIOG, GPIO_Pin_0
| GPIO_Pin_1 | GPIO_Pin_2| GPIO_Pin_3);
dev_buzzer_close();
}
Delay(1);
}
- 调试过程 1 代码编写完成,编译,无错误,下载进去后,蜂鸣器不响。手头暂时没有示波器。咋办? 目前并没有确定是软件问题还是硬件问题,因此,首先要确定硬件没有问题。 前面我们已经调通了IO口输出与定时器中断,可以利用定时器中断操作IO口翻转电平输出一个4K频率的PWM。 经验证,蜂鸣器响,硬件无问题。 2 经查询,发现在设置PWM通道时错误,参考的代码用的是通道1,而我们用的是通道2。初始化PWM时,每一个带OC1字符的函数或者定义都改为OC2即可。 也即是上面mcu_tim4_pwm_init代码中的20、21、22行。 3 目前蜂鸣器是能发出声音了,但是因为暂时没有示波器,无法保证频率是否准确,占空比是否是50%,实际项目中必须用示波器验证。
6.6. 总结¶
PWM应用非常广泛,除了控制蜂鸣器,还可以控制LED灯,或者控制LCD背光。 只要学会一种,其他都一样。